
Errata
-
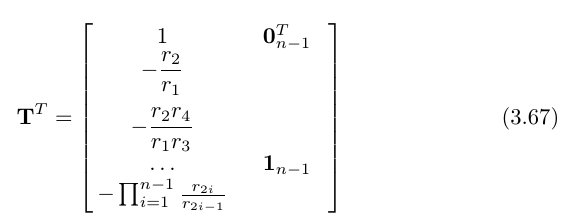
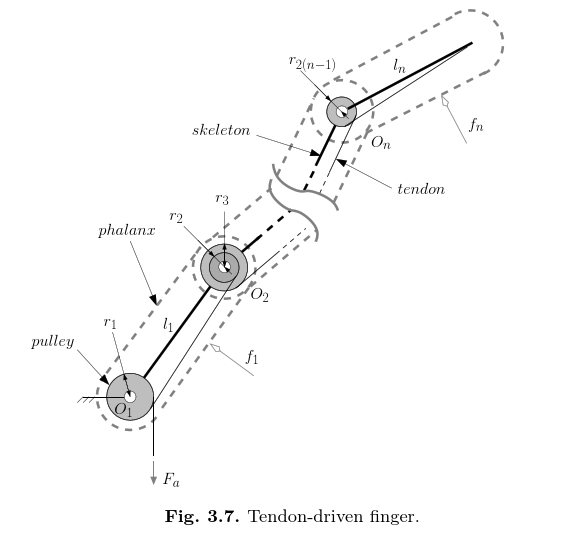
page 52, in eq. (3.67) and fig. 3.7 the value of the index of the last pulley's radius should be n-1 instead of n. This changes both items as such:
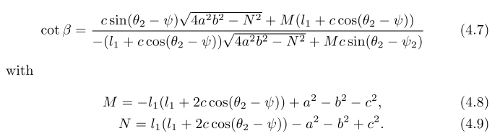
[thanks to Bruno Belzile] - page 65, eqs. (4.7) to (4.9) should read
(various typos corrected) - page 65, the line below eq. (4.11), one should read

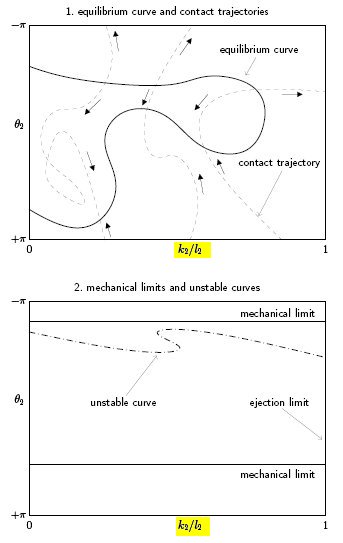
- page 76, Fig. 4.16, the triangles between k2 and l2 in the bottom axes of the first two plots should be replaced by a solidus:
- page 126, first sentence of second paragraph, missing space between "Gripper" and "(Hirose"
- page 143, the geometric interpretation of c as been the distance between points A1 and A2 is erroneous. The distances b1 and b2 as identified in Fig. 6.5 are also wrong. The equations in the text page 143 and 144 are correct though. [thanks to Bruno Belzile]
- page 165, the reference (Gosselin et al. 2008) is missing at the end of the book. The complete citation is:
Gosselin, C., Pelletier, F. and Laliberté, T.: An anthropomorphic underactuated robotic hand with 15 dofs and a single actuator. In: Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, California, USA (May 19-23, 2008).