
Le concept de sous-actionnement dans les doigts robotiques, avec moins d'actionneurs que de degrés de liberté, permet au préhenseur de s'adapter mécaniquement à un objet de forme irrégulière et inconnue, sans stratégie de contrôle complexe ou même de capteurs. On obtient alors un système mécaniquement intelligent ayant une capacité d'adaptation de forme.
L'analyse et le contrôle de ces mécanismes présentent des défis importants et, bien que des prototypes de mécanismes adaptifs existent depuis des siècles, beaucoup de zones d'ombre subsistent. L'objectif du laboratoire est de mener internationalement l'expertise sur cette technologie. Le laboratoire développe de nouvelles mains robotiques basée sur cette technologie pour des domaines allant de l'industrie à la chirurgie, cf. ci-dessous.
| Préhenseur compliant en Nitinol |
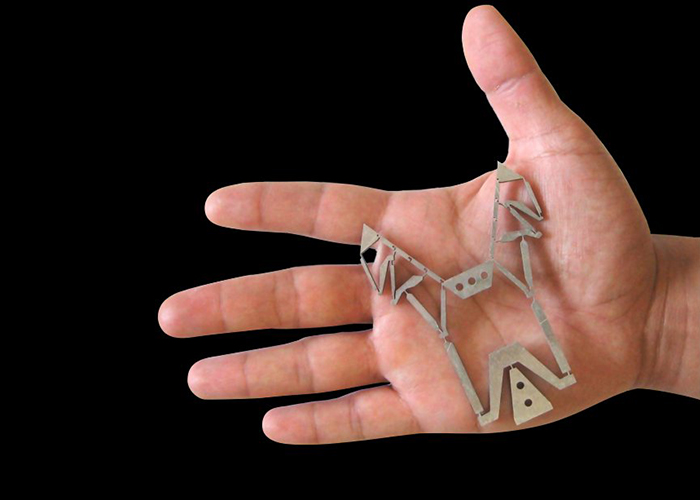
Préhenseur compliant adaptatif pour la chirurgie
par Mario Doria et Lionel Birglen
Polytechnique Montréal, 2008
| Préhenseur téléopéré compliant en polycaprolactone (PCL) avec mesure tactile proprioceptive |

Préhenseur compliant adaptatif téléopéré avec mesure tactile proprioceptive et retour d'efforts
par Bruno Belzile, Maxime Blaise et Lionel Birglen
Polyetchnique Montréal, 2013
| Nouvelle architecture réalisée en prototypage rapide |
|
Vidéo du prototype : VideoUG2010_mp4v2.avi ou Youtube Link Présentée pendant le 2010 International Workshop on Underactuated Grasping (UG2010)
|

| Doigt adaptatif pouvant être monté sur une pince classique |

Doigts mécaniques passivement adaptifs montés sur une pince pneumatique classique
Video du prototype : Youtube 1, Youtube 2, Youtube 3.
par Lionel Birglen, Polytechnique Montréal, 2014
| Doigt adaptatif souple à raideur variable |
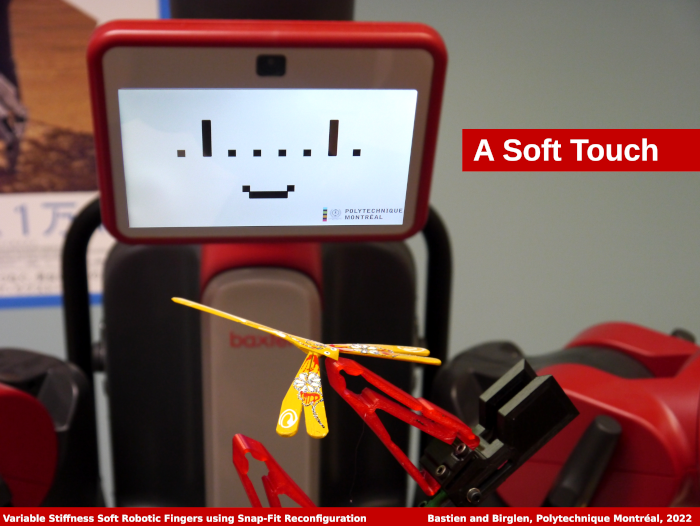
Doigts mécaniques souples pouvant changer de raideur à travers un changement de configuration cinématique et l'aide d'une liaison de type "snap-fit"
Video du prototype : Youtube
par Jérôme Bastien et Lionel Birglen, Polytechnique Montréal, 2022
En collaboration avec le Centre des Technologies de Fabrication en Aérospatiale (CTFA) et plusieurs autres partenaires industriels, le laboratoire a entrepris des travaux de recherche visant à l'emploi de systèmes robotiques à hautes performances pour la fabrication d'aéronefs.
| Modélisation et identification de robots industriels KUKA opérant en contact avec des structures aéronautiques |
Modélisation du soudage par friction malaxage à l'aide de robots industriels.

| Inspection robotisée des pièces pour l'industrie aérospatiale |
Un autre projet qui se consacre à l'inspection robotisée des pièces pour l'industrie aérospatiale est mené par le laboratoire en partenariat avec L-3 MAS, Pratt and Whitney Canada, le CNRC ainsi que trois autres universités à travers le CRIAQ.


| Jambe robotique adaptative |
Une nouvelle architecture de patte robotique s'adaptant aux obstacles qu'elles rencontrent pour une démarche efficace a été développée au laboratoire :

Voir une démonstration du prototype : Youtube Link
| Équilibrage statique |
Mécanisme à base de poulies non-circulaires permettant d'équilibrer un balancier avec une charge sur une rotation de 360 degrés :
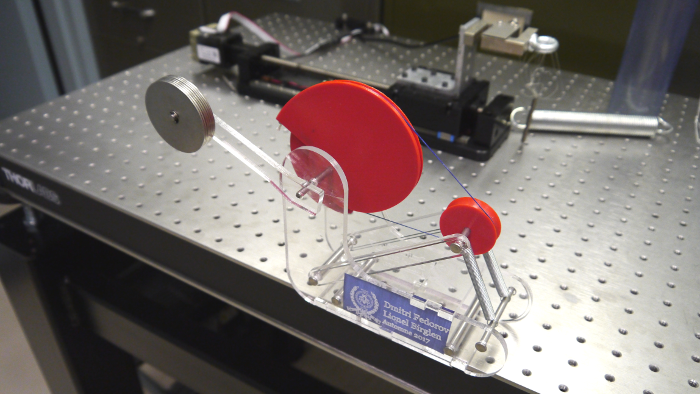
Voir une démonstration du prototype : Youtube Link
| Robots à cables |
Mécanisme à base de poulies non circulaires et d'amplification permettant de convertir une rotation continue d'un moteur en une trajectoire de manutention (pick and place) au bout des cables :
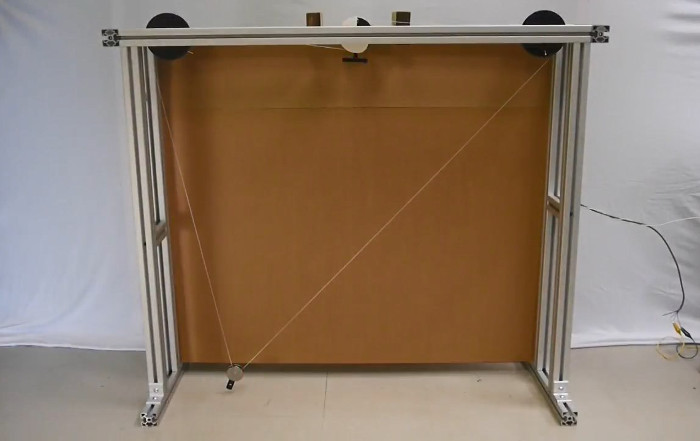
Voir une démonstration du prototype : Youtube Link
Robot à cables plan portable et en source libre :

Démonstration : YouTube Link 1 et YouTube Link 2
Source : https://github.com/LionelBirglen/OpenSourcePlanarCableRobot