
Visitez notre playlist sur YouTube!
Fauteuil roulant motorisé intelligent
Le groupe du professeur Gourdeau développe depuis plusieurs années en partenariat avec l'université McGill un fauteuil roulant motorisé intelligent capable de se déplacer de manière autonome.
Perception active
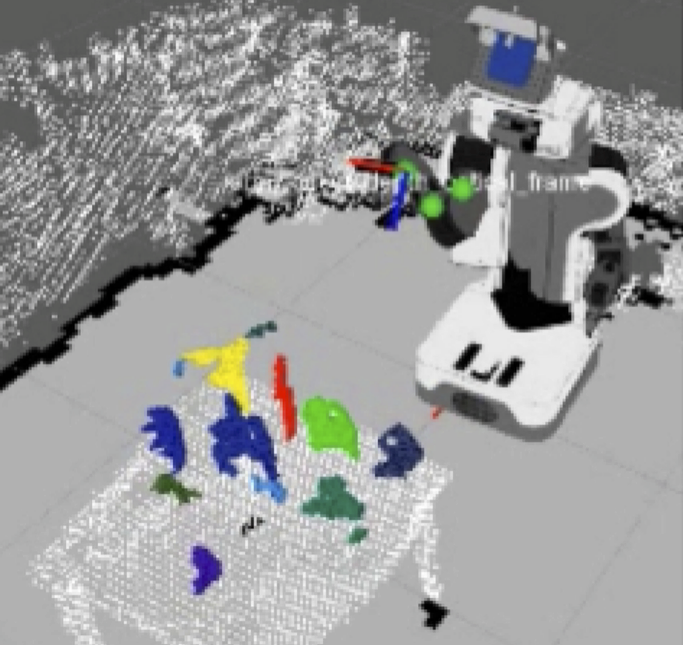 Le groupe du professeur Le Ny s'intéresse à divers problèmes en perception active, c'est-à-dire l'interaction entre la planification et la perception. Cela inclut par exemple le problème de cartographier une région en temps optimal, ou de comment déplacer un capteur pour améliorer la capacité d'un robot à reconnaître un objet ou son environnement.
Le groupe du professeur Le Ny s'intéresse à divers problèmes en perception active, c'est-à-dire l'interaction entre la planification et la perception. Cela inclut par exemple le problème de cartographier une région en temps optimal, ou de comment déplacer un capteur pour améliorer la capacité d'un robot à reconnaître un objet ou son environnement.

Dévelopment d'un drone civil
Le groupe du professeur Saussié développe actuellement les lois de commande d'un nouveau drone Québécois, qui sera l'un des plus gros drones civils au monde.
Equipes de robots autonomes
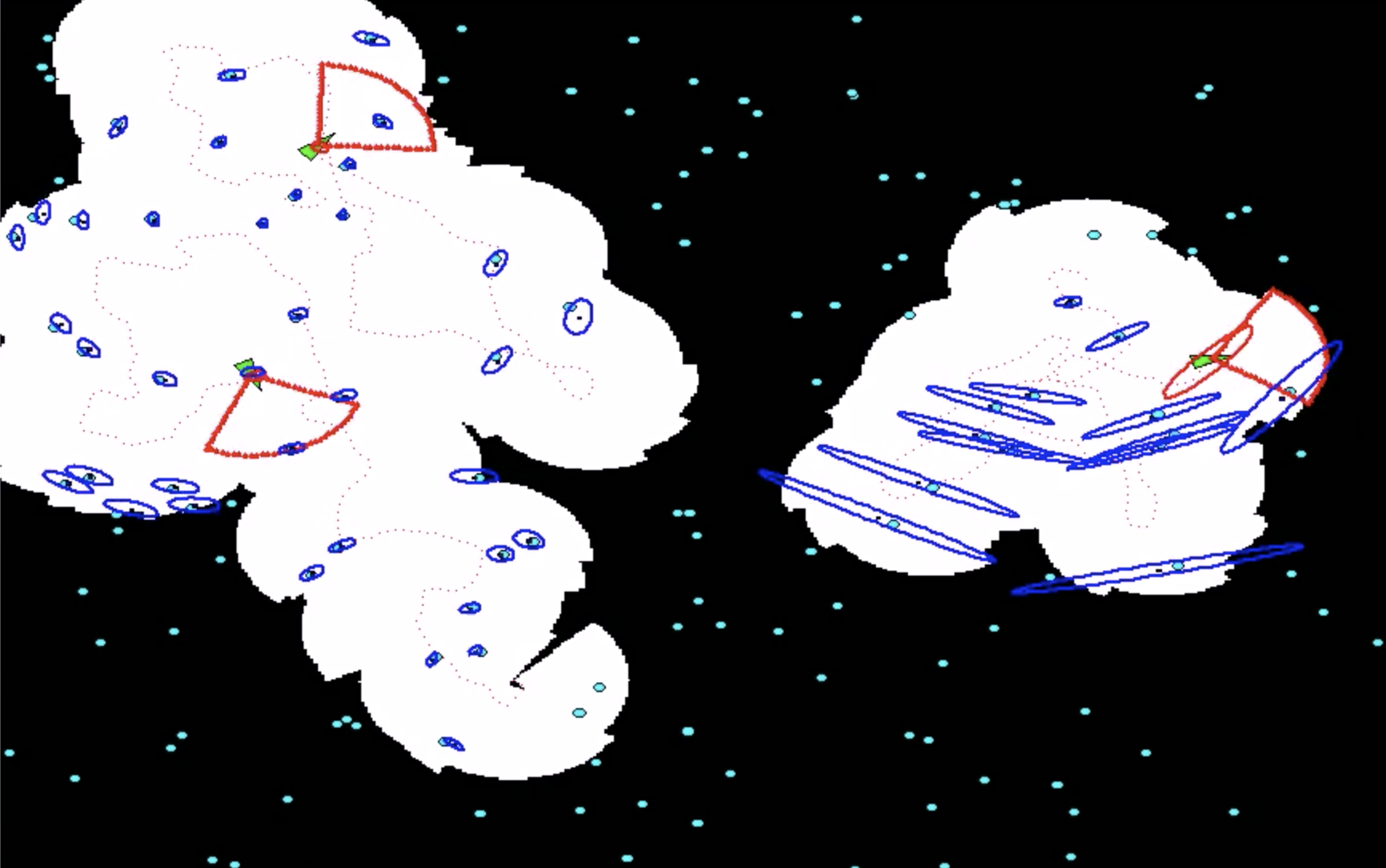
Les systèmes multi-robots sont un des principaux sujets d'étude dans le groupe du professeur Le Ny. Ces systèmes peuvent être considérés comme des réseaux de capteurs et d'actuateurs mobiles. Lorsque leur taille augmente, les robots doivent prendre la plupart de leurs décisions de manière autonome, à partir de l'information qu'ils ont collectée ou obtenue des autres robots et des opérateurs humains. Nos travaux portent par exemple sur le développement d'algorithmes et la conception de systèmes pour le déploiement de groupes de robots sous contraintes de communication ou pour établir un réseau de communication ad-hoc, les problèmes de couverture d'une région géographique, la navigation, localisation et cartographie simultanée coopératives, l'allocation de tâches, les applications aux systèmes de transport émergents, etc.
Sources de Financement

![]()
![]()