
Visit our YouTube playlist for some demos!
An Intelligent Motorized Wheelchair 
Active Perception
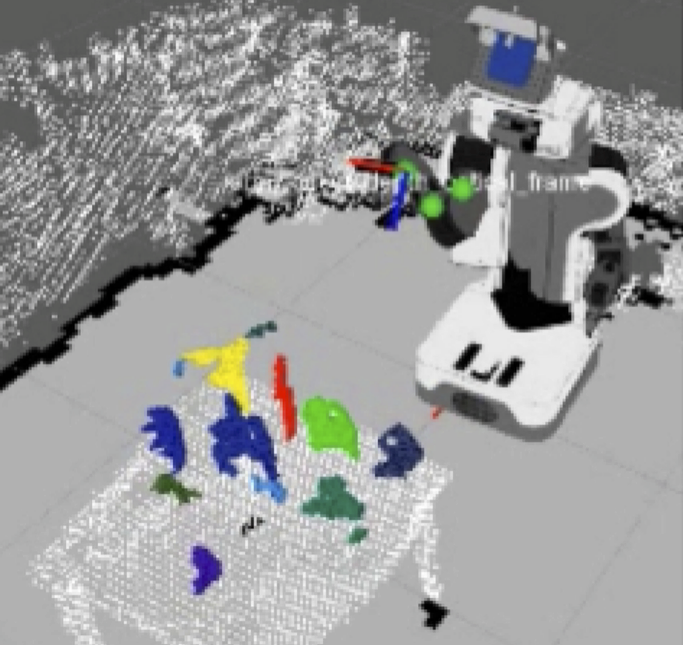
Prof. Le Ny's group works on various problems related to active perception, i.e., the interaction between planning and perception. This includes for exemple mapping an area in minimum time, finding an object quickly using sensor-based feedback, or how to move/set a sensor to help a robot detect and recognize objects more quickly.
Development of a Civilian UAV
Prof. Saussié's group is developping the flight control laws for a new autonomous helicopter, which will be one one of the largest civilian UAVs in the world.
Distributed Autonomous Robotic Teams (DART)
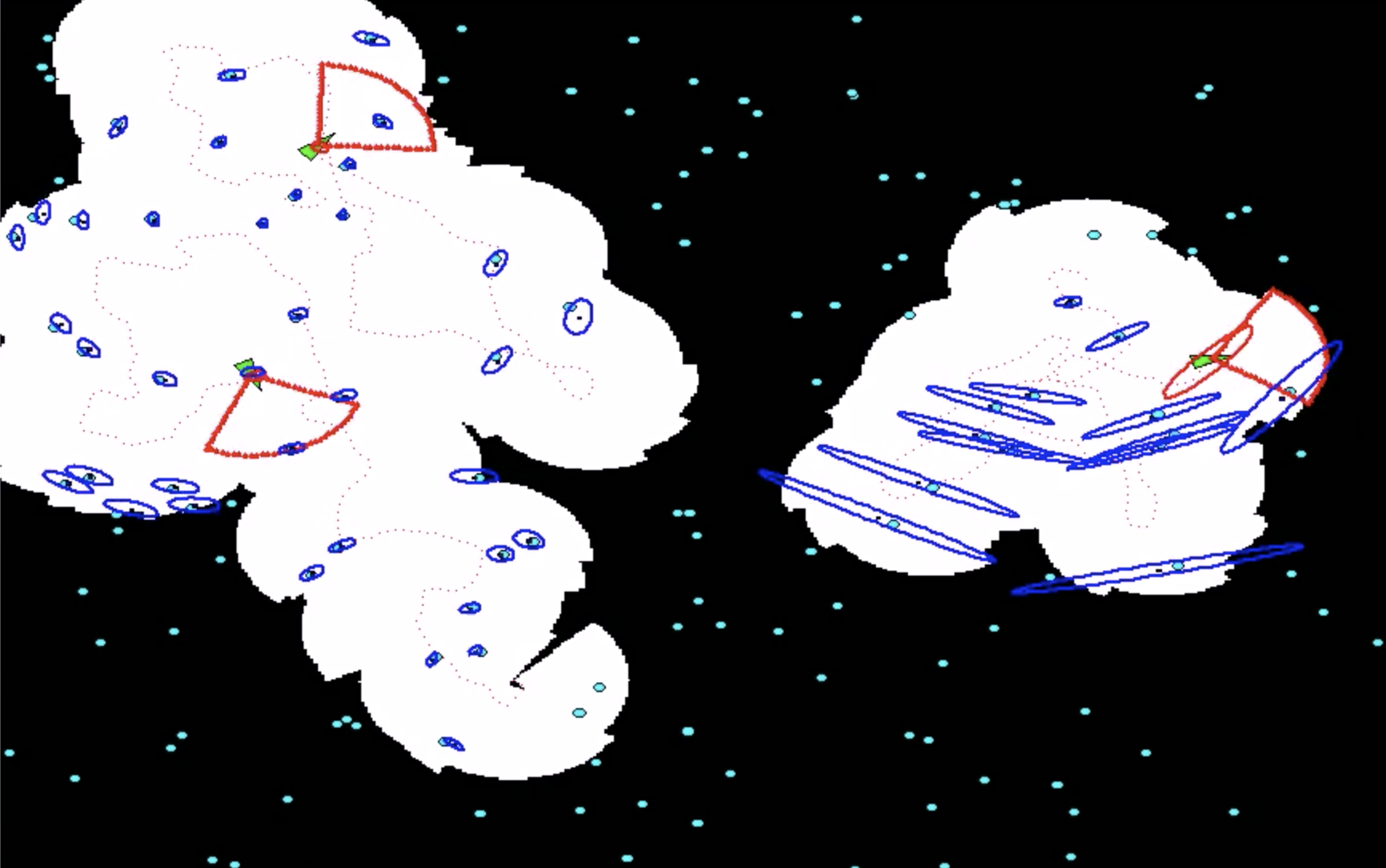
Multi-robot systems are a topic of focus in Prof. Le Ny's group. These systems can be viewed as mobile sensor networks, and as their size grows, the robots need to make most of their decisions autonomously, based on the information they collect or obtain from their teammates and human operators. Examples of work in this area include algorithm and system design for communication-constrained robotic network deployment, area coverage, cooperative navigation, workload partitioning, ad-hoc communication network deployment, or multi-robot simultaneous localization and mapping.
FUNDING AGENCIES

![]()
![]()