
Le laboratoire occupe environ 200 m2 au pavillon Lassonde de l'Ecole Polytechnique de Montréal. Il abrite une zone de capture de mouvement de 9m x 11m (système de 12 caméras VICON Bonita). Notre infrastructure logicielle est fondée sur ROS (Robot Operating System), ainsi que Gazebo pour la simulation.
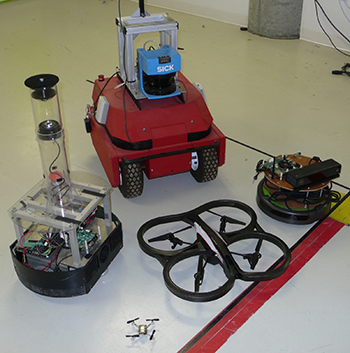
Nous disposons des robots mobiles suivants:
- 1 Fauteuil roulant motorisé équipé de 2 LIDARS Hokuyo, une Kinect, des capteurs à ultrasons
- 1 robot mobile Husky (Clearpath Robotics) équipé d'un bras manipulateur Kinova MICO, d'un GPS Novatel Terrastar, de caméras PTZ et stéréo (Bumblebee), d'un LIDAR SICK LMS511, d'une centrale inertielle de classe tactique
- 2 hexacoptères Firefly et 1 quadricoptère Pelican (Ascending Technologies)
- 1 quadricoptère AR.Drone et 1 quadricoptère AR.Drone 2.0 (Parrot)
- 2 nano-quadricoptères Crazyflie 2.0
- 1 iRobot Create 2 équipé d'une Kinect 2
- 4 Robots mobiles au sol développés "in-house" (2 actuellement en service), équippés de caméras catadioptriques
- 1 iRobot ATRV mini équipé d'un LIDAR SICK LMS 200
- 1 iRobot ATRV 2 équipé d'un LIDAR SICK LMS 200
Nous disposons aussi de moyens de base pour le développement de systèmes embarqués "custom", et nous travaillons avec plusieurs types de cartes de développement (Wandboard quads, NVidia Jetson TK1, STM32, etc.) pour l'implémentation de nos algorithmes.

LIENS UTILES
