
Our 2000 sq ft laboratory is situated in the Lassonde building at Polytechnique Montreal. Our students have access to a motion capture system consisting of 12 VICON Bonita 10 cameras covering an area of 28 ft x 36 ft. Our software infrastructure is based on ROS (Robot Operating System), as well as Gazebo for simulations.
We currently work with the following robots:
- 1 motorized wheelchair equipped with 2 LIDARS Hokuyo, one Kinect, and ultrasound sensors.
- 1 Husky unmanned ground vehicle (from Clearpath Robotics) equipped with a Kinova MICO 6 DOF manipulator, a Novatel Terrastar GPS, PTZ and stereo (Bumblebee) cameras, a SICK LMS511 LIDAR, a tactical class IMU.
- 2 Firefly hexacopters and 1 Pelican quadcopter (from Ascending Technologies)
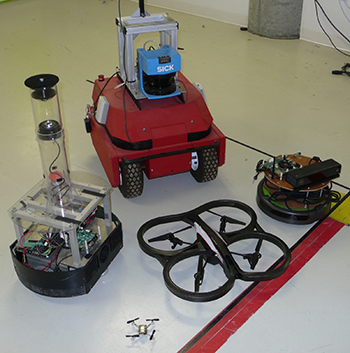
- Several AR.Drone quadcopters (from Parrot)
- Several nano-quadcopters Crazyflie 2.0
- 1 iRobot Create 2 equipped with a Kinect 2
- 4 custom mobile ground robots for indoor experiments, equipped with catadioptric cameras
- 1 iRobot ATRV mini equipped with a SICK LMS 200 LIDAR
- 1 iRobot ATRV 2 equipped with a SICK LMS 200 LIDAR
The lab provides space for experiments, computing stations, and access to electrical and mechanical prototyping tools. We implement our algorithms on various types of embedded computers (Wandboard quads, NVidia Jetson TK1, STM32, etc.).

LINKS