
Underactuation in robotic fingers, with less actuators than degrees of freedom, leads to a very particular mechanical behaviour where the finger adapts mechanically to the object seized. This shape adaptation allows to grasp irregularly shaped or unknown objects without any dedicated control or even sensors. Grippers built using this technique are therefore mechanically intelligent.
The analysis and control of these mechanisms are challenging and despite being known for centuries, adaptive mechanisms have yet to be thoroughly studied. Our knowledge of their properties is still very shallow. It is the objective of the lab to lead internationally the research on adaptive grippers and their applications. We have been and are currently still developing new prototypes for a vast range of applications including industrial manipulation and surgery (cf. example below).
| Compliant gripper |
Self-Adaptive Compliant Surgical Gripper
by Mario Doria & Lionel Birglen
Polytechnique Montréal, 2008
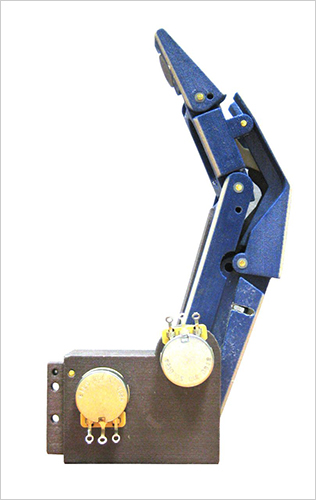
| Teleoperated compliant gripper in polycaprolactone (PCL) with proprioceptive tactile feedback |

Teleoperated Self-Adaptive Compliant Gripper with Proprioceptive Tactile Sensing and Haptic Feedback
by Bruno Belzile, Maxime Blaise and Lionel Birglen
Polyetchnique Montréal, 2013
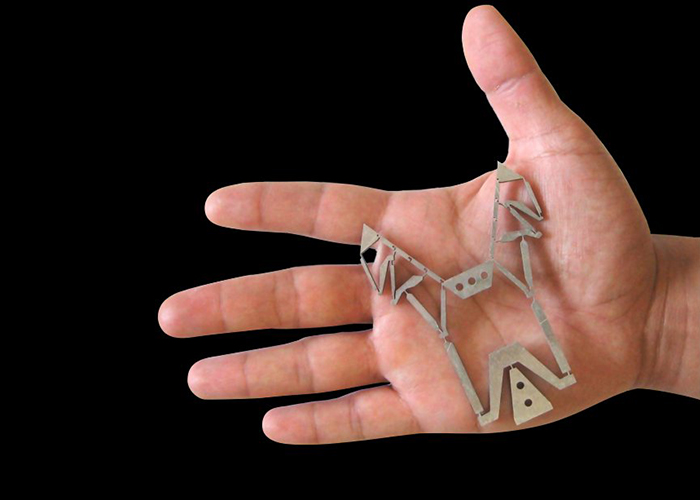
| New architecture made with rapid prototyping |
|
Video: VideoUG2010_mp4v2.avi |
| Self-Adaptive Fingers Transforming Industrial Grippers into Underactuated Hands |

Self-Adaptive Mechanical Fingers mounted on a standard pneumatic gripper
Video of prototypes: Youtube 1, Youtube 2, Youtube 3.
by Lionel Birglen, Polytechnique Montréal, 2014
| Variable Stiffness Soft Fingers |
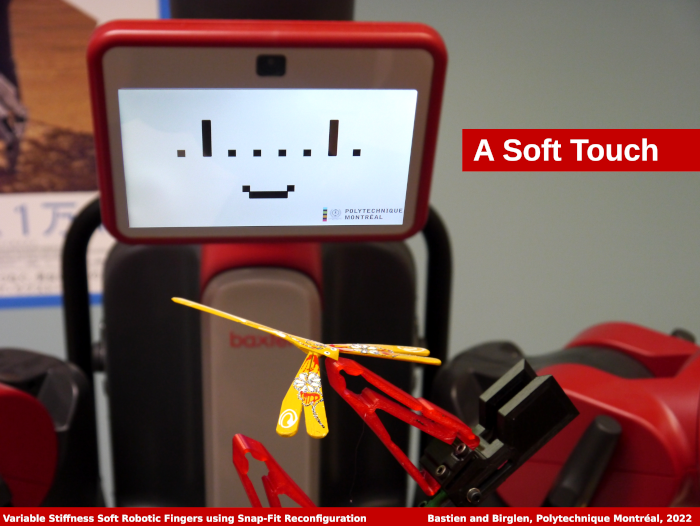
Variable stiffness soft robotic fingers. The stiffness switch is done through kinematic reconfiguration with the help of a snap-fit joint
Video of the prototype: Youtube link
by Jérôme Bastien and Lionel Birglen, Polytechnique Montréal, 2022
In collaboration with the Aerospace Manufacturing Technology Centre (AMTC) and several other industrial partners, a research initiative has been started aiming at using high performance robotic manipulators in the manufacturing of aerospace structures.
| Modeling and identification of Kuka industrial robots in contact with these structures is investigated |

| Robotic Inspection of Aerospace |
Another project focusing on the robotic inspection of aerospace parts is leaded by the laboratory and involves L-3 MAS, Pratt and Whitney Canada as well as the NRC and three other universities in collaboration with the CRIAQ.

A new design of robotic leg has been developed by our laboratory which can mechanically adapt to an unexpected collision with an obstacle for an efficient gait:

Demo of the prototype: Youtube Link
| Static Balancing |
Novel mechanism based on noncircular pulleys and springs able to balance a load at the end of a pendulum for a full rotational range of 360 degrees:
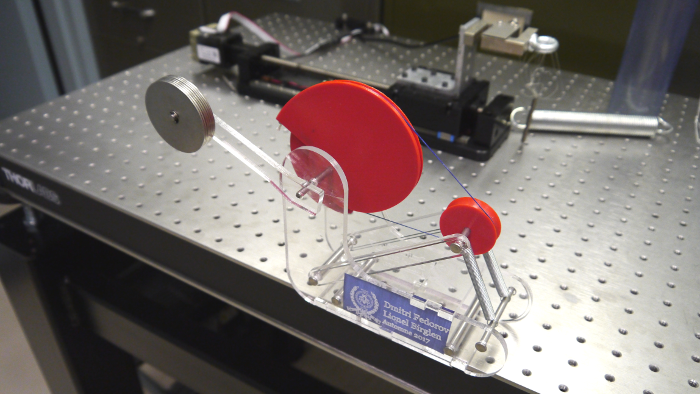
Demo of the prototype: Youtube Link
| Cable Robots |
Novel mechanism based on noncircular, idler, and amplification pulleys converting a continuous rotation of a motor into a complex pick and place trajectory at the end of the cables:
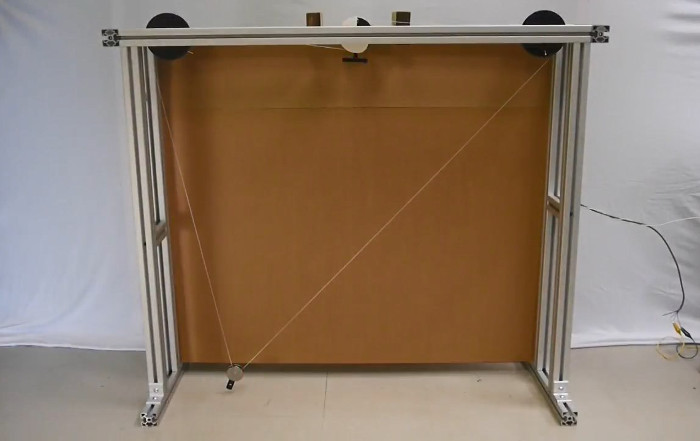
Demo of the prototype: Youtube Link
Open-Source Planar Cable Robot :

Demo: YouTube Link 1 and YouTube Link 2
Source: https://github.com/LionelBirglen/OpenSourcePlanarCableRobot