

 Le laboratoire de robotique est situé au C-543 et C-545 du pavillon principal Le laboratoire de robotique est situé au C-543 et C-545 du pavillon principal |
Plusieurs stations informatiques récentes avec double écrans sont disponibles au laboratoire et fonctionnent avec Windows 10. Tous ces postes sont équippés d'une suite logicielle complète permettant l'analyse et la conception de systèmes robotiques : Matlab, Simulink, Labview, Ansys, Catia, LaTeX, etc.
 Une armoire de simulation et de commande en temps réel Opal-RT est disponible au laboratoire et permet de commander jusqu'à 64 axes moteurs simultanément (environ 10 robots standards). Cette architecture utilise le logiciel RT-Lab intégré avec Simulink et les systèmes d'exploitation QNX (Unix dédié au temps réel) et Windows (pour l'interface usager).
Une armoire de simulation et de commande en temps réel Opal-RT est disponible au laboratoire et permet de commander jusqu'à 64 axes moteurs simultanément (environ 10 robots standards). Cette architecture utilise le logiciel RT-Lab intégré avec Simulink et les systèmes d'exploitation QNX (Unix dédié au temps réel) et Windows (pour l'interface usager).
 Le laboratoires possède plus d'une cinquantaine de moteurs électriques (à courant continu et pas à pas) de toutes les tailles et toutes les puissances ainsi que les amplificateurs et contrôleurs nécessaires à leur commande. La plupart de ces moteurs ont été achetés chez Maxon Motors, un fabricant de moteurs réputé qui a équipé les rovers qui explorent la planète Mars.
Le laboratoires possède plus d'une cinquantaine de moteurs électriques (à courant continu et pas à pas) de toutes les tailles et toutes les puissances ainsi que les amplificateurs et contrôleurs nécessaires à leur commande. La plupart de ces moteurs ont été achetés chez Maxon Motors, un fabricant de moteurs réputé qui a équipé les rovers qui explorent la planète Mars.
 Plusieurs capteurs d'effort à six axes de la compagnie ATI Industrial Automation sont disponibles au laboratoire. Ces capteurs ont des plages de mesure et des précisions variées.
Plusieurs capteurs d'effort à six axes de la compagnie ATI Industrial Automation sont disponibles au laboratoire. Ces capteurs ont des plages de mesure et des précisions variées.
 Le laboratoire dispose de tout l'équipement nécessaire au prototypage et au test de cartes électroniques : générateur de fonctions, oscilloscope numérique (avec port USB), source de tension stabilisée, multimètre de précision, fer à souder numérique, etc. La plupart de ces équipements ont été achetés chez Agilent.
Le laboratoire dispose de tout l'équipement nécessaire au prototypage et au test de cartes électroniques : générateur de fonctions, oscilloscope numérique (avec port USB), source de tension stabilisée, multimètre de précision, fer à souder numérique, etc. La plupart de ces équipements ont été achetés chez Agilent.
Le laboratoire possède deux machines de prototypage rapide de type Z450 de la compagnie ZCorp ainsi qu'une machine SST 1200es de la compagnie Dimension.
Z450 de ZCorp
 Cette machine permet de fabriquer rapidement et à un coût raisonnable des pièces mécaniques fonctionnelles et en couleurs. Le principe de fonctionnement de cette technologie a été développé par le MIT et consiste en une tête d'impression déposant un liant sur une poudre composite similaire à du plâtre.
Cette machine permet de fabriquer rapidement et à un coût raisonnable des pièces mécaniques fonctionnelles et en couleurs. Le principe de fonctionnement de cette technologie a été développé par le MIT et consiste en une tête d'impression déposant un liant sur une poudre composite similaire à du plâtre.
Ensuite, la machine dépose une nouvelle couche de poudre et répète l'opération. Une fois la pièce complètement construite en 3D avec le liant, l'excédent de poudre est retiré. La pièce est alors imprégnée par un infiltrant (cyanoacrylate, résine epoxy, eau salée) qui donne de la rigidité à la pièce ainsi que ses propriétés mécaniques définitives.
La machine est disponible pour tout usager qui le désire à Polytechnique. Nous contacter pour un estimé du coût de fabrication des pièces.
Exemples de pièces fabriquées avec notre Z450, notez que les couleurs sont d'origine et non peintes après fabrication :

SST 1200es de Dimension
 Cette machine est basée sur la technologie du Fused Deposition Modeling (FDM) qui consiste à déposer sur une surface de travail un fil de plastique fondu (ABS) et à dessiner ainsi une couche de la pièce à fabriquer. Une fois cette première couche déposée, on descend la surface de travail d'une faible hauteur et on recommence la séquence de déposition de l'ABS. Dans la plupart des cas, un matériel de support est aussi déposé par la machine pour servir de base à une couche ultérieure de plastique. Ce matériel de support est ensuite dissout dans un bain qui laisse la pièce en ABS intacte.
Cette machine est basée sur la technologie du Fused Deposition Modeling (FDM) qui consiste à déposer sur une surface de travail un fil de plastique fondu (ABS) et à dessiner ainsi une couche de la pièce à fabriquer. Une fois cette première couche déposée, on descend la surface de travail d'une faible hauteur et on recommence la séquence de déposition de l'ABS. Dans la plupart des cas, un matériel de support est aussi déposé par la machine pour servir de base à une couche ultérieure de plastique. Ce matériel de support est ensuite dissout dans un bain qui laisse la pièce en ABS intacte.
La machine est disponible pour tout usager qui le désire à Polytechnique. Nous contacter pour un estimé du coût de fabrication des pîèces.
Nous disposons au laboratoire de plusieurs robots incluant :
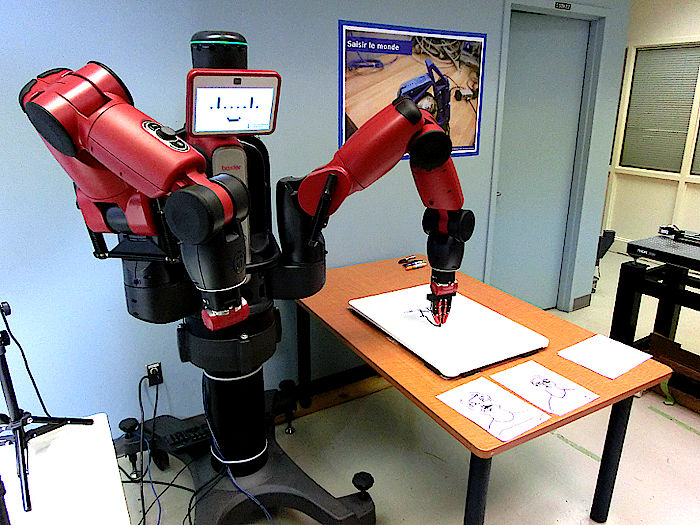
| Un robot collaboratif Baxter avec ses préhenseurs électriques | ||
 |
||
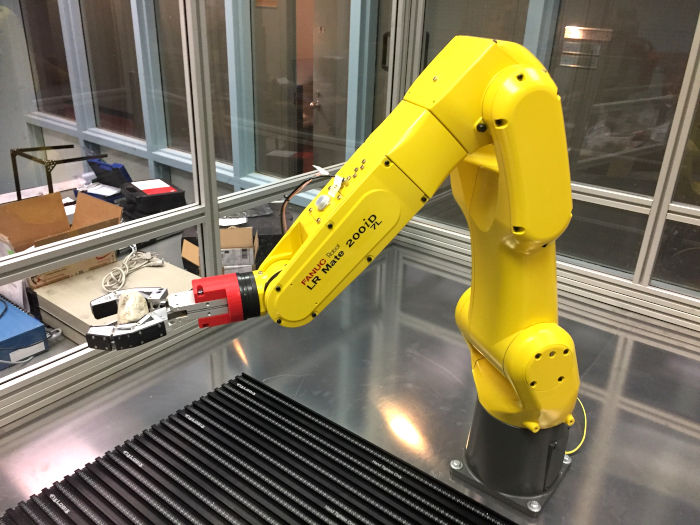
| Un robot industriel sériel FANUC LR Mate 200iD/7L (version à bras long) avec son contrôleur R-30i | ||
|
|
||
| Deux robots mobiles Khepera II équipés de plusieures options dont le module de vision linéaire et le préhenseur | ||
 |

 Un système haptique Falcon Limited Edition de la compagnie Novint est disponible au laboratoire. Il s'agit d'un robot parallèle de type Delta donc à trois degrés de liberté qui permet de créer des efforts sur l'utilisateur. On peut ainsi commander un système tout en ressentant des caractéristiques telles que la raideur, viscosité ou rugosité d'une surface. La bibliothèque de développement SDK est aussi disponible au laboratoire pour adapter le Falcon à tous les besoins.
Un système haptique Falcon Limited Edition de la compagnie Novint est disponible au laboratoire. Il s'agit d'un robot parallèle de type Delta donc à trois degrés de liberté qui permet de créer des efforts sur l'utilisateur. On peut ainsi commander un système tout en ressentant des caractéristiques telles que la raideur, viscosité ou rugosité d'une surface. La bibliothèque de développement SDK est aussi disponible au laboratoire pour adapter le Falcon à tous les besoins.
